Greensea Systems(Greensea)是海洋机器人软件解决方案的行业领导者,成立的愿景是改善海洋环境中人与机器之间的工作关系。Greensea推出其最新产品OPENSEA Edge朝着这一愿景迈出的又一步,有望为海洋机器人带来真正的自主性。
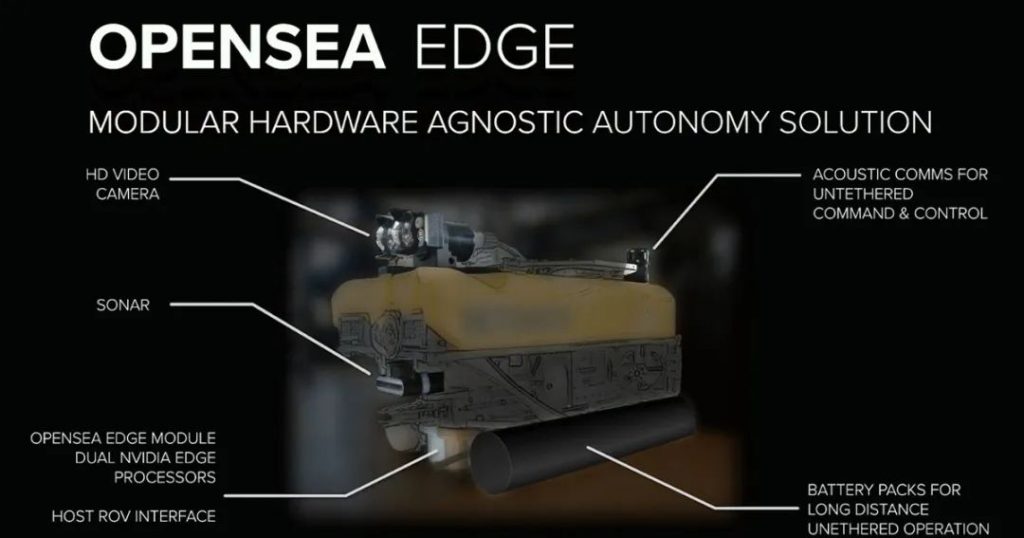
基于Greensea完善的开放式架构平台OPENSEA,OPENSEA Edge提供了更高水平的运营商能力。虽然OPENSEA提供导航、控制、自主、感知和远程通信的软件功能,但OPENSEA Edge提供了一个模块化的,与硬件无关的处理平台,将传统的ROV转换为具有自主、AI、车辆感知和无线、超视距、通信和控制的ROV。从本质上讲,它是一个方便的附加包,可将集成的边缘处理和感知系统集成到传统ROV中。
OPENSEA Edge利用并行NVIDIA处理器来处理声纳和视频感知反馈,同时为机器人提供自主性、通信和任务管理。该平台将巨大的处理能力放在机器人的边缘,它可以直接处理传感器数据并为车辆做出决策。OPENSEA用于低带宽和高延迟通信链路的安全C2软件包为监督机器人的操作员提供了海底到超视距的通信解决方案。借助OPENSEA的开放式架构框架和可用的处理空间,开发人员可以安装自己的自主性和感知处理软件,包括AI/ML库。
OPENSEA Edge最初是为军事用途开发和测试的,现已经安装部署在无缆遥控ROV以及水雷对抗和爆炸物处理应用中的海底爬行机器人上。OPENSEA Edge已被用于改造传统的商用ROV以及新车辆制造的基础。凭借在军事应用中的成熟性能,Greensea现在将OPENSEA Edge作为商业产品。随着海底行业具有成本效益和持久性的海上运营的未来,OPENSEA Edge将成为该行业建立的开放式架构处理基础。
Greensea是ROV控制和自主方面的专家,通过与其他海底技术企业的合作,OPENSEA Edge能够提供完整的解决方案。其中一个例子是Greensea与总部位于英国的SeeByte合作,SeeByte是自动目标识别(ATR)技术的专家。ATR系统使用快速的机器学习技术从前探声纳数据中检测和分类目标。任何配备OPENSEA Edge的ROV现在都可以根据广泛且不断增长的内部过去经验库来识别目标。
通过边缘处理,ROV变得活跃起来。车辆上的数据处理、导航和控制允许在边缘做出决策。这为冗余、故障缓解和集成新级别的自治所需的平台铺平了道路。OPENSEA Edge是一个“盒子里的大脑”——一个模块化和与车辆无关的自主解决方案,满足制造商、服务提供商和系统集成商的未来需求。
OPENSEA平台功能
导航
导航、定位和姿态估计
OPENSEA平台包括一个灵活的导航和定位引擎,具有针对不同条件、环境和任务的多种导航模式。所有Greensea的导航系统都针对尺寸、重量、功率和成本(SWaP-C)限制进行了优化,同时提供极其精确的导航,绝对地理参考和定位车辆。该技术支持手动导航传感器融合,可根据应用程序进行定制,以增强针对任何给定情况做出正确决策的能力。
Greensea的导航通过使用级联导航估计方法实现最佳结果。估计算法识别受损的传感器数据,并选择最佳的传感器组合来优化解决方案。它还支持手动传感器融合以进行态势决策。Greensea导航产品目前用于具有挑战性的环境,例如高动态潜水员移动平台,以及需要替代导航坐标系的储罐检查和船体检查。
控制
高度稳定,可快速修改,完全集成
OPENSEA强大的车辆控制架构提供了卓越的车辆稳定性和机动性。车辆可以通过自动驾驶仪控制来克服环境挑战,该控制系统目的是快速适应不断变化的条件。电传操纵系统可用于控制水面、海底和陆地运载工具及其有效载荷。而且,凭借对数千个传感器和各种设备的现有支持,Greensea控制技术可以快速配置为完全集成的系统。
监督自治
安全、高效且可扩展的多任务处理
通过监督自主,操作员拥有更高级的语言来向其机器人伙伴传达命令。综合惯性导航、车辆控制、自动化任务、有效载荷和目标相对定位相结合,提供了一个功能强大、易于操作的系统。操作员可以提高他们的态势感知能力,并专注于开展工作,而不必成为ROV驾驶员。
从自主发送ROV到6000米到远程控制桥梁架设船,Greensea的监督自主系统专为工作而设计。通过利用其成熟的模块化核心技术OPENSEA,系统可以快速、稳健地设计和安装。
人机界面
重新定义操作员控制
Greensea擅长为操作员界面提供底层模块化操作平台(OPENSEA),该平台为完全集成的复杂机器人系统提供环境。这项技术使 Workspace 能够为操作员提供两个关键优势:简化的工作流程和支持实际应用程序的增强功能。
能力:
• 多操作员环境
• 远程工作站
• 多资产跟踪和通信
• 传感器聚合和可视化
• 地理配准传感器数据
技术:
• 完全集成,跨平台(Linux,Windows)
• 模块化和分布式数据
• 无服务器数据共享
• 诊断、信号绘图、报警管理
• 定义排除区和“停留”区
• 定义横断面角度和间距
• 一次操作中执行多个任务
• 在航点自动执行任务:悬停、等待、站位保持、悬停、环绕、重复任务、转向X等圈
(2023-02-18)